

Resultados del ensayo de desbroce del monte en Galicia con robot
Los valores de rendimiento obtenidos durante el ensayo son muy superiores a los que se notificaron previamente para RoboEVO
El 2 de abril de 2025 se realizó un ensayo de desbroce en el Monte Vecinal en mano Común de Verducedo e Lomba, de la Comunidad de Moscán (O Páramo, Lugo), en una zona conveniada con la Xunta de Galicia. Se trata de un monte con abundancia de afloramientos de roca y pendientes acusadas, con un 48% de la superficie por encima del 30% (17⁰) e incluso zonas puntuales por encima del 60% (31⁰). El monte cuenta con una plantación de pino del país de 8 años, en la que se habían realizado desbroces de mantenimiento a lo largo de calles en máxima pendiente, aunque en algunas zonas la propia pendiente y la presencia de rocas habían impedido el desbroce con tractor.
Los pinos tienen un desarrollo adecuado, con una altura media de unos 4 m, pero todavía con abundante matorral de tojo, retama y brezo, que alcanzan coberturas completas y alturas próximas a los 1,5 m, en particular en áreas donde no pudieron aplicarse desbroces de mantenimiento (Figura 1).
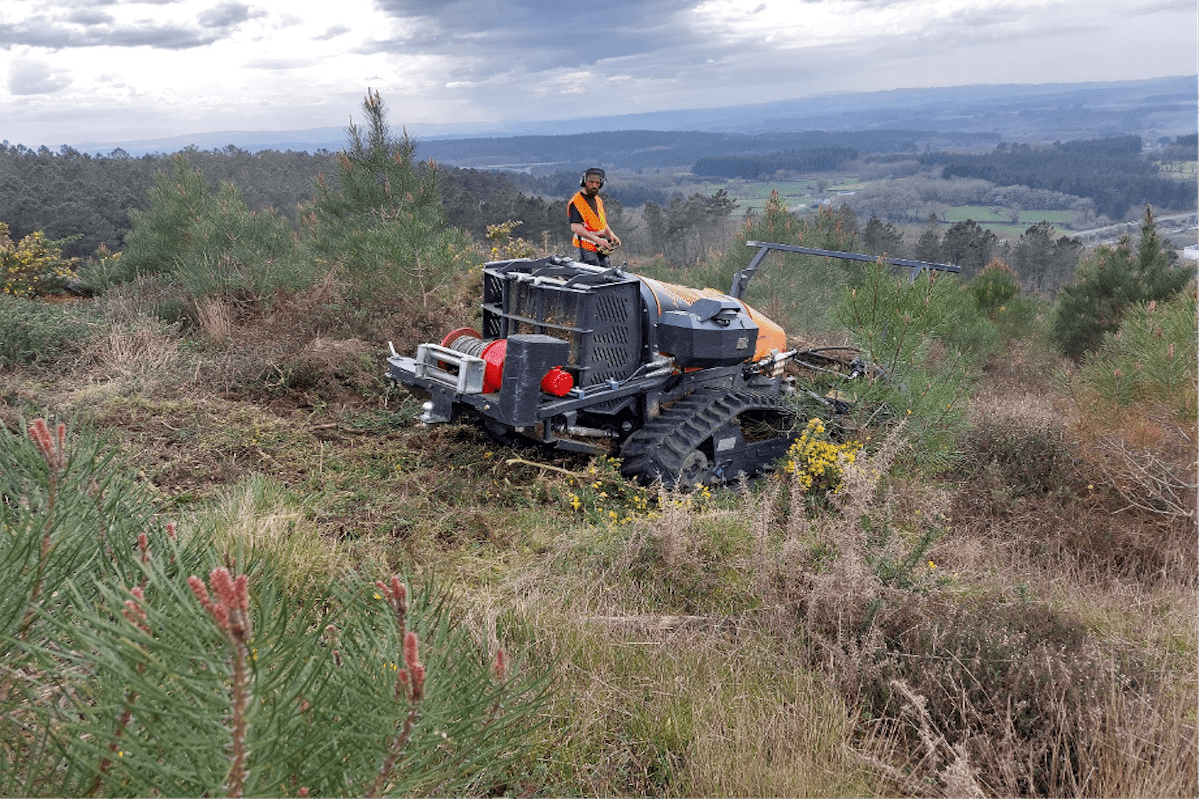
Figura 1. Aspecto general desde la parte alta del rodal de ensayo en monte Verducedo e Lomba
El objetivo de la experiencia fue comparar los resultados de desbroce con los obtenidos con máquinas que se han empleado previamente, como el robot RoboEVO de Energreen. En el caso que nos ocupa, la experiencia se realizó en un monte con evidentes dificultades de mecanización.
El robot RoboFIFTI de Energreen va dotado de un motor Perkins a gasoil con potencia de 50 CV, con 3 cilindros en línea y refrigeración líquida. La transmisión es hidráulica, con 3 circuitos independientes, uno para cada cadena y otro para accionar el implemento de desbroce. La transmisión de potencia a las orugas se realiza mediante dos bombas de pistones a circuito cerrado, reversibles y de caudal variable, que puede alcanzar 28 l/min en cada bomba, a una presión máxima de 250 bares. Los motores hidráulicos que accionan las ruedas cabillas son reversibles y de desplazamiento variable, permitiendo la variación de cilindrada controlar la velocidad de avance y retroceso, adaptándose a las necesidades operativas (ver Figura 2).
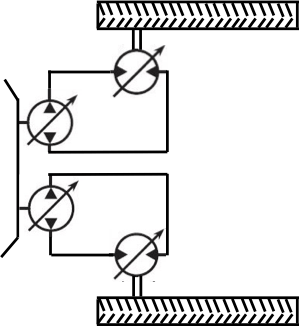
Figura 2. Esquema simplificado de disposición de bomba hidráulica y motores hidráulicos para la trasmisión de potencia a las orugas
La transmisión se gestiona directamente por los motores hidráulicos integrados en las ruedas, a través de la variación de cilindrada de los mismos, que se controla hidráulicamente. Esto permite gestionar las dos velocidades de avance sin necesidad de una reducción final mecánica adicional.
Tal y como nos ha detallado el fabricante, el implemento y el winch son accionados por una tercera bomba a engranajes en circuito abierto, separada de las bombas que alimentan la transmisión. Esta bomba está gestionada por un distribuidor electrohidráulico multisección, que distribuye el flujo entre los diferentes dispositivos de la máquina.
El tren de rodaje usado en estos trabajos fue el de orugas forestales de goma, con ancho de 28 cm y tacos dispuestos en V, con hasta 5 cm de altura máxima. La superficie total de contacto con el suelo ascendería a 8400 cm2. Este tipo de cadenas aseguró una buena estabilidad en todas las zonas trabajadas.
El implemento de desbroce, montado al frente del equipo, fue el Forestry 130T de Energreen, con ancho de trabajo de 1,2 m, presión del circuito hidráulico de 305 bar y un motor hidráulico de 23 cc y caudal de aceite de 55 L/min, con 32 martillos fijos, de acero de alta resistencia, dispuestos en helicoidal a lo largo del tambor giratorio (Figura 3). El peso total del robot con el implemento de desbroce por trituración fue de 1600 kg, lo que permite su transporte en una furgoneta adaptada.

Figura 3. Detalle del implemento de desbroce, formado por martillos fijos dispuestos en helicoidal sobre eje horizontal
En la tabla 1 se muestran las características del modelo empleado (RoboFIFTI) en comparación con modelos previos que se habían ensayado (RoboEVO).

Los tiempos se dividieron en dos grupos fundamentales: PW o tiempo productivo, en el que se controlaba el Robot a través de control remoto mientras este estaba desbrozando y PT o tiempo de preparación, empleado en el traslado entre áreas de actuación, giros entre calles, planificación o movimientos de la máquina sin realizar desbroce. No se han contabilizado en este caso tiempos derivados de interrupciones o derivados de reparaciones, mantenimiento o repostaje.
Resultados
Durante la realización del ensayo se comprobó la estabilidad del robot, derivada de su bajo centro de gravedad. Esta circunstancia permitió incluso los giros a media ladera en pendientes cercanas al 60% con la finalidad de cambiar de calle por encontrar afloramientos de rocas, circunstancia que no sería posible en desbroces con tractor (Figura 4). La estabilidad en pendiente que declara el fabricante (50⁰, 142%) no pudo comprobarse en este monte, si bien pudo establecerse que la estabilidad es adecuada en pendientes de hasta el 60%, tanto con la máquina dispuesta en sentido de máxima pendiente (Figura 5) como con la máquina dispuesta a lo largo de la línea de nivel.

La capacidad de superación de obstáculos resultó sin embargo limitada, lo que se relaciona directamente con los ángulos de ataque y de entrada de la máquina y su corto despeje, resultado derivado de su bajo centro de gravedad. La superación pudo conseguirse en algunos casos atacando el obstáculo a partir de una de las cadenas o bien bordeándolo. Esta circunstancia condiciona el riesgo de empanzado, lo que puede solventarse si se dispone de cabrestante de apoyo.

Figura 5. RoboFIFTI en bajada desbrozando en línea de máxima pendiente
Los rendimientos obtenidos si se consideran exclusivamente los tiempos de trabajo productivo (PW) fueron de 5,22 h/ha durante la mañana y de 4,96 h/ha durante la tarde. Si se consideran adicionalmente los tiempos de preparación, las cifras obtenidas son de 8,7 h/ha durante la mañana y de 8,3 h/ha durante la tarde. Los valores corresponden a una única pasada de desbroce por calle y a un espacio entre líneas de árboles de 3 m, sin que resultase posible un mayor acercamiento a las líneas de arbolado por no haberse realizado poda.
La calidad del desbroce realizado es muy adecuada, con una trituración fina del material más leñoso y una altura de los tallos de matorral inferiores a 5 cm. El sentido de desbroce puede ser tanto en ascenso de ladera como en descenso, lo que supone una ventaja respecto de los tractores agrícolas modificados para uso forestal en pendientes muy pronunciadas. Trabajando en elevada pendiente y en sentido ascendente resultó preferible levantar ligeramente el implemento frontal de desbroce para evitar patinado de las cadenas de goma al desplazarse el robot por encima de zona desbrozada (ver Figura 6).

Figura 6. Trabajo en ascenso en elevadas pendientes con posibles problemas de patinado si la altura de desbroce es muy baja
En una zona concreta del monte, en colindancia con fincas particulares, RoboFIFTI mostró buenas condiciones para desbrozar restos de corta con cargas de biomasa moderadas, facilitando su maniobrabilidad el trabajo en el entorno de muros de piedra (Figura 7).
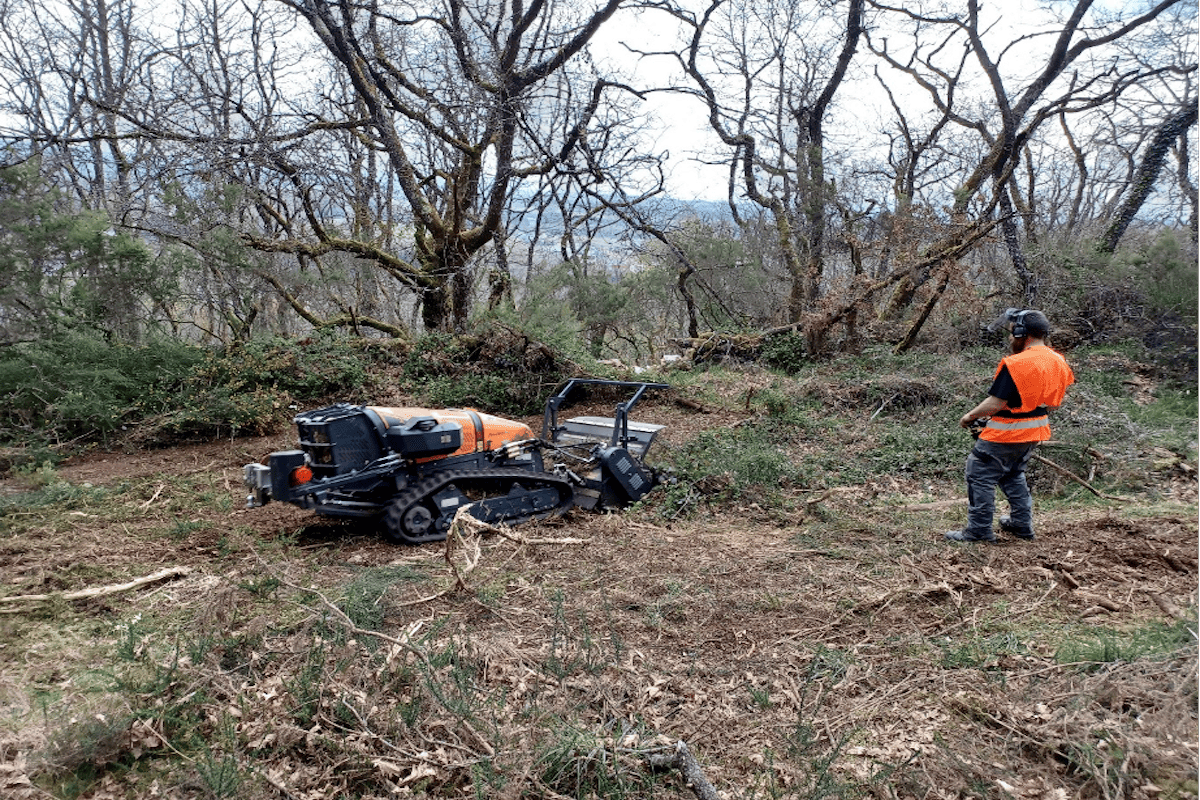
Figura 7. RoboFIFTI desbrozando restos de corta y matorral en proximidades de muros de piedra
Discusión y conclusiones
Los valores de rendimiento obtenidos son muy superiores a los que se habían reportado previamente para RoboEVO (rango de 4,4 a 12,3 h/ha para tiempo de trabajo efectivo). Adicionalmente, debe considerarse que en esas cifras corresponden a un monte muy llano y con vegetación fundamentalmente de zarza. El mejor rendimiento obtenido por RoboFIFTI se debe muy posiblemente al implemento de desbroce empleado en este caso, mucho más adaptado a vegetación leñosa.
Como alternativa de desbroce en ese monte, aunque no se ha ensayado, únicamente cabría emplear tractores estrechos con tren de rodaje de neumáticos., que presentarían riesgos muy evidentes de vuelco e imposibilidad para abordar el trabajo en muchas de las calles, por la presencia de rocas y la imposibilidad de dar giros a media ladera en esas condiciones de pendiente. Adicionalmente, el sentido de trabajo debería ser único, desbrozando en ascenso y marcha atrás.
Por otra parte, para un desbroce manual los rendimientos serían muy bajos, estimables en 100 a 150 m2/h, lo que supondría entre 67 y 100 h/ha de operario de motodesbrozadora. El robot ensayado se muestra por tanto como una opción a tener muy en cuenta en desbroces en condiciones de elevada pendiente, afloramientos de rocas o en el entorno de muros de piedra y obstáculos, que son característicos de las fajas secundarias de gestión de biomasa alrededor de núcleos rurales.




{kind=link}
{kind=link}