

Resultados do ensaio de roza do monte en Galicia con robot
Os valores de rendemento obtidos durante o ensaio son moi superiores aos que se reportaron previamente para RoboEVO
O 2 de abril de 2025 realizouse un ensaio de roza no Monte Veciñal en man común de Verducedo e Lomba, da Comunidade de Moscán (O Páramo, Lugo), nunha zona conveniada coa Xunta de Galicia. Trátase dun monte con abundancia de afloramentos de rocha e pendentes acusadas, cun 48 % da superficie por encima do 30 % (17⁰) e mesmo zonas puntuais por encima do 60 % (31⁰). O monte conta cunha plantación de piñeiro do país de 8 anos, na que se realizaron rozas de mantemento ao longo de rúas en máxima pendente, aínda que nalgunhas zonas a propia pendente e a presenza de rocas impediran a roza con tractor.
Os piñeiros teñen un desenvolvemento adecuado, cunha altura media duns 4 m, pero aínda con abundante matogueira de toxo, xesta e queiroga, que alcanzan coberturas completas e alturas próximas aos 1,5 m, en particular en áreas onde non puideron aplicarse rozas de mantemento (Figura 1).
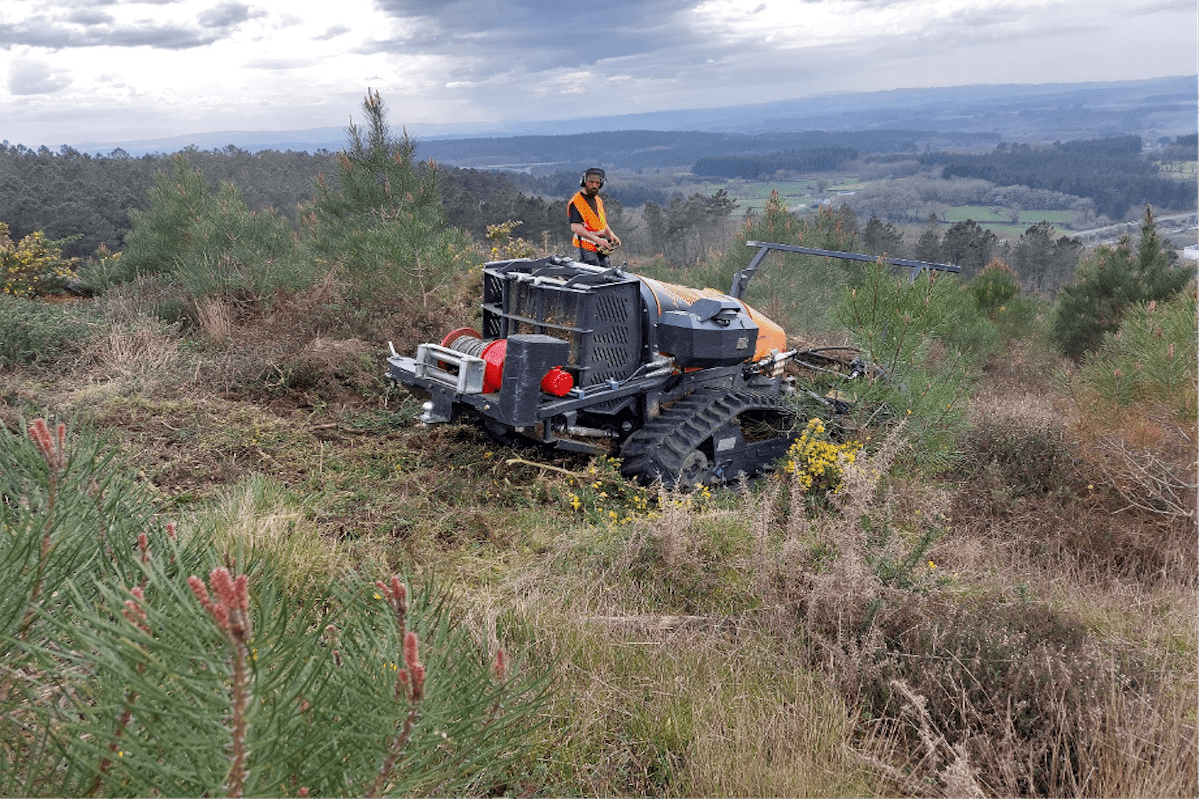
Aspecto xeral dende a parte alta do rodal de ensaio en monte Verducedo e Lomba
O obxectivo da experiencia foi comparar os resultados de roza cos obtidos con máquinas que se empregaron previamente, como o robot RoboEVO de Energreen. No caso que nos ocupa, a experiencia realizouse nun monte con evidentes dificultades de mecanización.
O robot RoboFIFTI de Energreen vai dotado dun motor Perkins a gasoil con potencia de 50 CV, con 3 cilindros en liña e refrixeración líquida. A transmisión é hidráulica, con 3 circuítos independentes, un para cada cadea e outro para accionar o implemento de roza. A transmisión de potencia ás orugas realízase mediante dúas bombas de pistons a circuíto pechado, reversibles e de caudal variable, que pode alcanzar 28 l/min en cada bomba, a unha presión máxima de 250 bares. Os motores hidráulicos que accionan as rodas cabillas son reversibles e de desprazamento variable, permitindo a variación de cilindrada controlar a velocidade de avance e retroceso, adaptándose ás necesidades operativas (ver Figura 2).
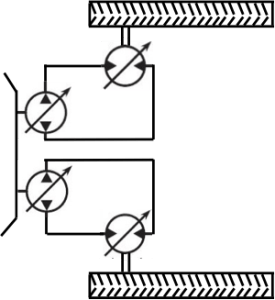
Figura 2. Esquema simplificado de disposición de bomba hidráulica e motores hidráulicos para a trasmisión de potencia ás orugas
A transmisión xestiónase directamente polos motores hidráulicos integrados nas rodas, a través da variación de cilindrada dos mesmos, que se controla hidráulicamente. Isto permite xestionar as dúas velocidades de avance sen necesidade dunha redución final mecánica adicional.
Tal e como nos detallou o fabricante, o implemento e o winch son accionados por unha terceira bomba a engrenaxes en circuíto aberto, separada das bombas que alimentan a transmisión. Esta bomba está xestionada por un distribuidor electrohidráulico multisección, que distribúe o fluxo entre os diferentes dispositivos da máquina.
O tren de rodaxe usada nestes traballos foi o de orugas forestais de goma, con ancho de 28 cm e tacos dispostos en V, con ata 5 cm de altura máxima. A superficie total de contacto co chan ascendería a 8400 cm2. Este tipo de cadeas asegurou unha boa estabilidade en todas as zonas traballadas.
O implemento de roza, montado á fronte do equipo, foi o Forestry 130T de Energreen, con ancho de traballo de 1,2 m, presión do circuíto hidráulico de 305 bar e un motor hidráulico de 23 cc e caudal de aceite de 55 l/min, con 32 martelos fixos, de aceiro de alta resistencia, dispostos en helicoidal ao longo do tambor xiratorio (Figura 3). O peso total do robot co implemento de roza por trituración foi de 1600 kg, o que permite o seu transporte nunha furgoneta adaptada.

Figura 3. Detalle do implemento de roza, formado por martelos fixos dispostos en helicoidal sobre eixo horizontal
Na táboa 1 móstranse as características do modelo empregado (RoboFIFTI) en comparación con modelos previos que se ensaiaron (RoboEVO).

Os tempos dividíronse en dous grupos fundamentais: PW ou tempo produtivo, no que se controlaba o Robot a través de control remoto mentres leste estaba a rozar e PT ou tempo de preparación, empregado no traslado entre áreas de actuación, xiros entre rúas, planificación ou movementos da máquina sen realizar roza. Non se contabilizaron en leste caso tempos derivados de interrupcións ou derivados de reparacións, mantemento ou reposición.
Resultados
Durante a realización do ensaio comprobouse a estabilidade do robot, derivada do seu baixo centro de gravidade. Esta circunstancia permitiu mesmo os xiros a media ladeira en pendentes próximas ao 60 % coa finalidade de cambiar de rúa por atopar afloramientos de rocas, circunstancia que non sería posible en rozas con tractor (Figura 4). A estabilidade en pendente que declara o fabricante (50⁰, 142%) non puido comprobarse neste monte, aínda que puido establecerse que a estabilidade é adecuada en pendentes de ata o 60 %, tanto coa máquina disposta en sentido de máxima pendente (Figura 5) como coa máquina disposta ao longo da liña de nivel.

Figura 4. Circulación de RoboFIFTI en oblicuo, que permite cambios de liña de roza. A notar a matogueira de maior desenvolvemento en zonas que non puideron rozarse previamente con tractores
A capacidade de superación de obstáculos resultou, con todo, limitada, o que se relaciona directamente cos ángulos de ataque e de entrada da máquina e o seu curto despexe, resultado derivado do seu baixo centro de gravidade. A superación puido conseguirse nalgúns casos atacando o obstáculo a partir dunha das cadeas ou ben bordeándoo. Esta circunstancia condiciona o risco de empanzado, o que pode liquidarse se se dispón de cabrestante de apoio.

Figura 5. RoboFIFTI en baixada rozando en liña de máxima pendente
Os rendementos obtidos se se consideran exclusivamente os tempos de traballo produtivo (PW) foron de 5,22 h/ha durante a mañá e de 4,96 h/ha durante a tarde. Se se consideran adicionalmente os tempos de preparación, as cifras obtidas son de 8,7 h/ha durante a mañá e de 8,3 h/ha durante a tarde. Os valores corresponden a unha única pasada de roza por rúa e a un espazo entre liñas de árbores de 3 m, sen que resultase posible un maior achegamento ás liñas de arborado por non realizarse poda.
A calidade da roza realizada é moi adecuada, cunha trituración fina do material máis leñoso e unha altura dos talos de matogueira inferiores a 5 cm. O sentido de roza pode ser tanto en ascenso de ladeira como en descenso, o que supón unha vantaxe respecto dos tractores agrícolas modificados para uso forestal en pendentes moi pronunciadas. Traballando en elevada pendente e en sentido ascendente resultou preferible levantar lixeiramente o implemento frontal de roza para evitar patinado das cadeas de goma ao desprazarse o robot por encima de zona rozada (ver Figura 6).

Figura 6. Traballo en ascenso en elevadas pendentes con posibles problemas de patinado se a altura de roza é moi baixa
Nunha zona concreta do monte, en colindancia con leiras particulares, RoboFIFTI mostrou boas condicións para rozar restos de curta con cargas de biomasa moderadas, facilitando a súa maniobrabilidade no traballo na contorna de muros de pedra (Figura 7).
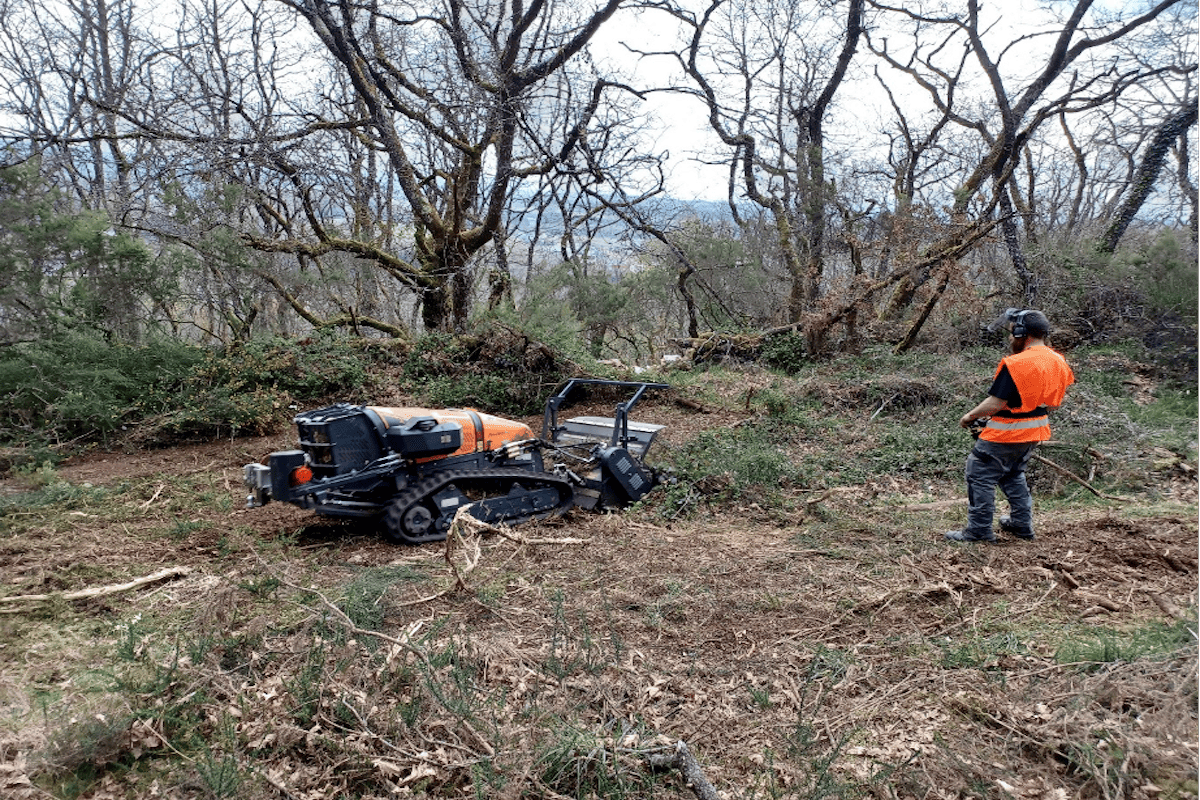
Figura 7. RoboFIFTI rozando restos de curta e matogueira en proximidades de muros de pedra
Discusión e conclusións
Os valores de rendemento obtidos son moi superiores aos que se reportaron previamente para RoboEVO (rango de 4,4 a 12,3 h/ha para tempo de traballo efectivo). Adicionalmente, debe considerarse que nesas cifras corresponden a un monte moi chairo e con vexetación fundamentalmente de silva. O mellor rendemento obtido por RoboFIFTI débese moi posiblemente ao implemento de roza empregada neste caso, moito máis adaptado a vexetación leñosa.
Como alternativa de roza nese monte, aínda que non se ensaiou, unicamente cabería empregar tractores estreitos con tren de rodaxe de pneumáticos, que presentarían riscos moi evidentes de envorco e imposibilidade para abordar o traballo en moitas das rúas, pola presenza de rocas e a imposibilidade de dar xiros a media ladeira nesas condicións de pendente. Adicionalmente, o sentido de traballo debería ser único, rozando en ascenso e marcha atrás.
Por outra banda, para unha roza manual os rendementos serían moi baixos, estimables en 100 a 150 m2/h, o que supoñería entre 67 e 100 h/ha de operario de motodesbrozadora. O robot ensaiado móstrase por tanto como unha opción para ter moi en conta en rozas en condicións de elevada pendente, afloramentos de rocas ou na contorna de muros de pedra e obstáculos, que son característicos das faixas secundarias de xestión de biomasa ao redor de núcleos rurais.




{kind=link}
{kind=link}